Diffusion Models in Vision
Questions
- What is Diffusion Model?
- How diffusion models work?
- What can diffusion models do?
近期diffusion model在很多地方都被应用,如Tsinghua - Liu Yebin团队CVPR paper DiffuStereo,在此对扩散模型做一个简单的阅读,提出三个问题看在文档结尾能否给自已一些答案
Surveys & Blogs
- Diffusion Models in Vision: A Survey
- Understanding Diffusion Models: A Unified Perspective, by Calvin Luo, Google Brain
- What are Diffusion Models? - Lil’s Blog
- 由浅入深了解Diffusion Model - ewrfcas’s Zhihu Article
DDPM
| Denoising Diffusion Probabilistic Models
Overview
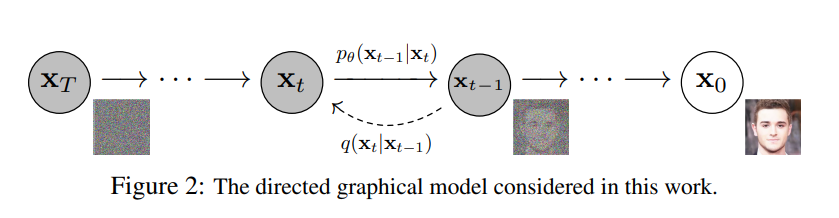
如 [1] [2] 等文章中阐述,diffusion model实际是一种生成模型。Model主要包含两个part,添加T轮的噪声部分 (Forward Pass) 以及对噪声图进行denoise的部分 (Reverse Pass)。
Forward Pass (Diffusion Pass)
Forward Pass即对图片$x_0 \sim q(x)$逐次添加噪声的过程,并最终呈现为完全的噪声分布。在添加噪声的过程中,每一个时刻$t$只与先前时刻$t-1$以及对应的Gaussian噪声有关。其中,$x_1, x_2, … x_t$均为与原图像同维度的latent code。即有
$$
q(x_t|x_{t-1}):=\mathcal{N}(x_t;\sqrt{1-\beta_t}x_{t-1}, \beta_tI)
$$
其中$\beta \in (0,1)$为扩散率,实际中随着$t$的增大而增大。
整个过程可以被看成不断添加噪声的Markov过程,对于任意时刻$t$则有
$$
q(x_{1:t}|x_0):=\Pi_{i=1}^tq(x_i|x_{i-1})
$$
另外在[1]中也证明了,对于Gaussian分布,对于任意时刻$t$,若$\alpha_i:=1-\beta_i, \bar{\alpha}_i:= \Pi _{s=1}^i\alpha_s$有
$$
q(x_t|x_0)=\mathcal{N}(x_t;\sqrt{\bar{\alpha}_t}x_0,(1-\bar{\alpha}_t)I)
$$
这可以让我们通过$x_0,\beta$来快速获取时间$t$下的$x_t$,实际上即有
$$
x_t = \sqrt{\bar{\alpha}_t}x_0+\sqrt{1-\bar{\alpha}_t}\epsilon
$$
Reverse Pass
与Forward Pass相反,在Reverse Pass中我们希望找出一个分布$p_\theta(x_{0:t})$,也由一个高斯核转移的Markov链来定义:
$$
p_\theta(x_{t-1}|x_t):=\mathcal{N}(x_{t-1}; \mu_\theta(x_t,t), \sum_\theta(x_t,t))
$$
其中$\theta$为模型参数。对于任意时刻$t$则有
$$
p_\theta(x_{0:t}):=p(x_t)\Pi_{i=1}^tp_\theta(x_{t-1}|x_t)
$$
虽然无法得到分布$q(x_{t-1}|x_t)$,但在我们知道$x_0$的情况下,可以通过贝叶斯公式得到
$$
\begin{aligned}
q(x_{t-1}|x_t, x_0)&=q(x_t|x_{t-1},x_0)\frac{q(x_{t-1}|x_0)}{q(x_t|x_0)}\
&= … \
&=\mathcal{N}(x_{t-1};\tilde{\mu}(x_t,x_0),\tilde{\beta}_tI)
\end{aligned}
$$
利用上述式子可以将Reverse Pass转变为更易求解的Forward Pass,而其中的$\tilde\mu$可以由预测的Gaussian分布和$x_t$得到,在DDPM中有$\sum_\theta(x_t,t)=\tilde\beta_t$,即可以表征当前时刻的分布。对于网络则需要学习出时刻$t$下的高斯噪声分布。
Reparameterization
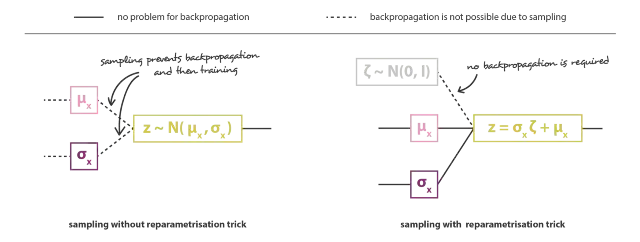
和VAE类似,我们希望整个过程是可导的来完成训练的过程,而从一个高斯分布中进行采样这个过程是不可导的,而在Diffusion Model中每一步都充满了高斯分布的影响。因此和VAE一样,在Diffusion Models中也采用了重参数的技巧来使得采样过程变得可导。
$$
z=\mu_\theta+\sigma_\theta \cdot \epsilon, \epsilon \in \mathcal{N}(0,I)
$$
对于一个高斯分布$z$来说,他可以被描述成上式的形式,利用上式的写法,其仍然是满足以均值为$\mu_\theta$、方差为$\sigma_\theta^2$的高斯分布,而随机性被转移到了$\epsilon$上。
Training
与VAE类似,在[1]中推导出其训练损失即为组合的KL散度和熵,在[1][2]等中都有较为详细的推导。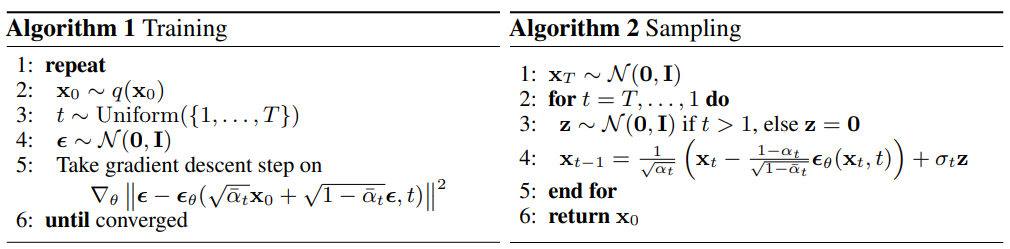
而$L_0$则认为是一个离散化的过程,构建一个离散化的分段积分累乘。即在Sampling过程中$t==1$获取生成图片时不需要在这一步继续添加噪声求解。实际上,网络学习的就是每一个时刻和下一个时刻
Conclusion
本质上,DDPM就是通过网络来学习到时刻$t$的噪声,并利用推导的公式来进行$t-1$时刻的生成,并不断重复此过程来获取最终生成的图片。而训练的时候,输入为$x_0$和噪声$\epsilon$的线性组合即$x_t$和时刻$t$,并通过对应的Loss进行约束训练。
但图像的质量往往取决于采样频率$T$的多少,而频率高了之后带来的问题是采样过程、训练过程十分漫长。在DDIM[4]中对这个问题进行了研究,并对此进行了加速。[4]中对$q(x_{t-1}|x_t, x_0)$进行推导分析,实际可以利用起始点和终点直接算出$q(x_{x}|x_k, x_0)$,即可以不像DDPM一样逐次采样,从而减少采样次数。
SR3
| Image Super-Resolution via Iterative Refinement
文章[5]则是利用了Diffusion来做超分的任务。
Conditional Reverse Pass
和DDPM、DDIM不同,超分是一项特定的任务,因此在reverse pass中需要加入条件约束。因此在SR3中提出,原先在reverse pass中只需要输入$(x_t, t)$,而在超分任务中需要将LR image插值到HR image大小后,concat作为网络的输入。
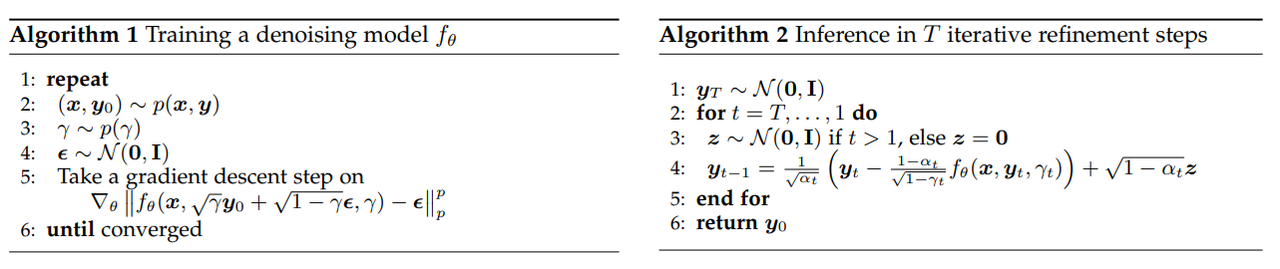
除此之外,上图中的$p(\gamma)$实际上是噪声率。在DDPM中通过不断扩散的方式进行添加噪声,将时刻$t$加入到网络的输入中。而在SR3中则取消了时刻的输入,而是直接改为将当前的噪声率$\gamma$embedding。而这个$\gamma$在训练过程中实际上是对间隔$[\bar{\alpha}_{t-1}, \bar{\alpha}_t]$的一个均匀采样,与DDPM直接取$\bar{\alpha}_t$不同。
Furthur Thoughts
利用SR3的思路,实际上对于Image2Image的任务,都可以通过类似这种形式简单粗暴地改写reverse pass。如对于deblur,也可以通过这种方法,将noise图片作为condition一起输入到网络中,作为reverse阶段的输入。
DSR - Deblur
| Deblurring via Stochastic Refinement
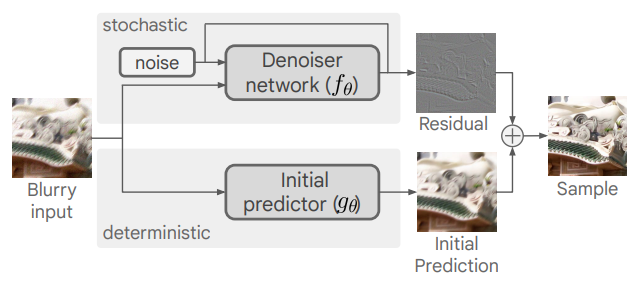
Split Branch
如上图的overview,在这篇CVPR的deblur文章中,对于模糊图片的处理采用了两个模块:一个是initial预测deblurred的模块,另一个则是使用diffusion来预测残差的模块。最终将两个output结合生成deblurred image。
Miscs
另外与DDPM等不同的是,DSR仍然采用的和SISR相似的策略,在patch上训练,在image上inference.而由于每一次的采样都具有随机性,为了让结果更为稳定,文章中采用多次重建取均值的方式来提升最终的效果。
Back to NCSN - Score-Based Modeling
| Generative Modeling by Estimating Gradients of the Data Distribution
Score and Generation
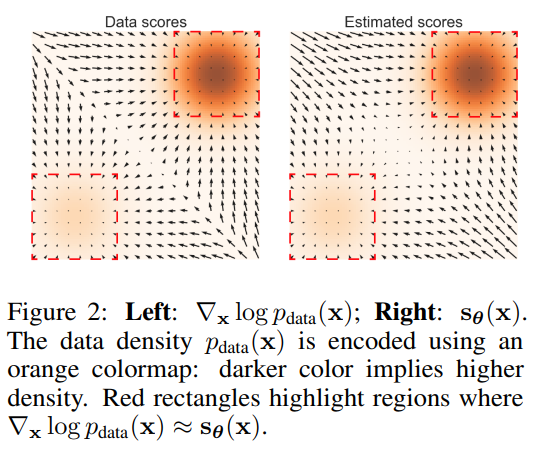
实际上这一篇NCSN(Noise Coinditional Score Network, or Score-Based Modleing)[7]比DDPM更早将扩散模型作为生成模型来使用。在NCSN中,score实际上就是数据分布的梯度,利用这个score可以让我们从一个噪声基于Langevin Dynamics采样(实际上DDPM的采样也是类似这种形式),来生成最终的image。文章提出由于低密度区域的数据分布的score其实很难预测,这会导致很难或无法通过这些预测很差的score来生成最终的数据分布。因此NCSN提出,可以通过在数据中加入Gaussian噪声的方式,来扩大原先高密度的区域,这样能够使低密度区域相比与先前更容易预测score。由于添加了噪声会导致数据分布与原先不大一致,因此添加噪声的强弱等也属于一个tradeoff,需要让其不断增强对低密度区域的预测,但也要同时尽量保持希望的数据分布。
若$p_\theta(x)$为概率分布,实际上score即为$\nabla\log p_\theta(x)$,即概率的对数梯度。score的趋势即指向数据密度更高的方向,如上图所示。生成的过程即我们在空间中的点,每一个点通过Langevin Dynamics采样来不断逼近目标数据。即
$$
x_t\leftarrow x_{t-1}+\frac{\epsilon}{2}\nabla\log p_\theta(x_t)+\sqrt{\epsilon}z_t
$$
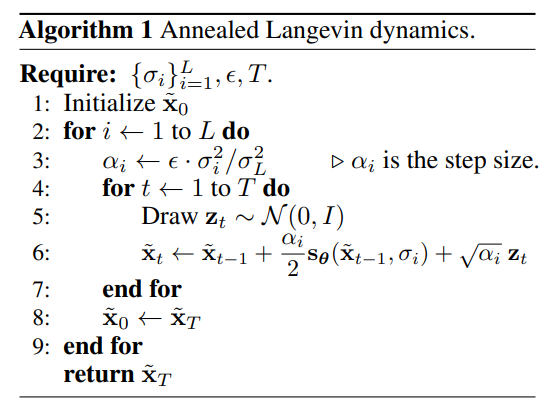
实际上上述采样的过程即为分L步,期间每一步确定了noise level和步长,然后在这每一步中再进行T次的Langevin Dynamics采样。实际上在T=1的时候,和DDPM中的采样方式是一致的。
How to Get Scores
实际上估计score就是估计每一次添加的噪声(实际上score和噪声相比只差一个scale,基于添加的Gaussian噪声)。
在文章[8](非常solid的一篇paper)中,将diffusion model与SDE的关系进行了更为详细的阐述,对连续形式的diffusion pass和reverse pass进行了构建说明,并将NCSN和DDPM进行了整合。实际上,NCSN要得到最终的一张纯噪声图,由于是在原图上直接进行的添加,因此需要非常大的噪声来掩盖原图的信息;而DDPM实际上是通过对原图进行比例控制来达到相同的目的。
DiffuStereo
| DiffuStereo: High Quality Human Reconstruction via Diffusion-based Stereo Using Sparse Cameras
Diffusion in DiffuStereo
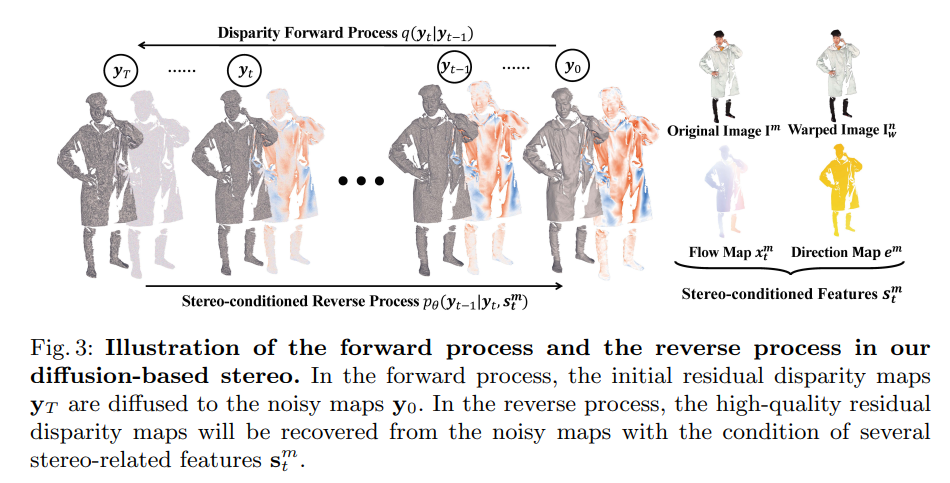
在DiffuStereo一文中,作者利用diffusion model来对disparity进行refine。其中diffusion model不是直接将disparity map进行refine,而是将其与gt的残差作为model的输入。
实际上,DiffuStereo中的diffusion和SR3类似,也是一种conditional diffusion。DiffuStereo中利用了origin image、warped image、flow map(利用init flow和当前时刻的residual计算)和direction map一起作为输入来当作diffusion model的condition。和DDPM等不同的是,DiffuStereo的采样过程中扩散率是线性增加的。另外,对于initial的输入,DiffuStereo还做了一个global feature,将其应用于diffusion model的各个时刻。
$$
L_t=\mathbb{E}_{y_0,\epsilon,t}[||f_\theta((1-\gamma_t)y_0+\gamma_t\epsilon,s,t)-y_0||^2]
$$
在Supp. Mat.中,diffusion model的训练损失是每一个时刻输出与$y_0$的$L_2$损失,见上式。和SR3类似,只是将模型直接预测噪声转成了预测残差值,即当前时刻的观测与噪声的线性组合。
Diffusion model在DiffuStereo中的作用就是改进flow map(disparity map),它是一个独立的模块,理论上可以提供给所有的stereo来做refine。但原文并没有将这个module在别的stereo method进行实验,因此无法下结论是否这个模块在stereo method上都能够对结果有进一步提升,但是一个可以尝试的思路。
End of this Doc
- What is Diffusion Model?
扩散模型实际上和GAN类似是一种生成模型,输入噪声图经过model得出需要的结果。
- How diffusion models work?
扩散模型通过定义添加噪声的forward pass/diffusion pass和denoise的reverse pass以及相关的loss和数学推导来完成模型的训练,训练的model实际上是用于预测当前时刻/噪声率下的噪声,并以此不断迭代最终生成需要的image的过程。
和GAN相比,GAN需要训练生成器和判别器两个模型,整个过程相对于diffusion model只需要训练一个过程而言更复杂且不稳定。而在生成任务中diffusion model能够达到很好的效果。
- What can diffusion models do?
In vision,扩散模型已经有研究人员们用于做图片生成、超分、去噪、甚至于检测(DiffusionDet)等一系列任务中。总体而言本质上需要我们定义好reverse的过程以及对应的condition,可以在对应的任务进行尝试。在多模态领域,diffusion model也有非常出色的表现。
- Pros & Cons
如上述问题中所回答的,扩散模型可以高效的解决GAN等生成模型训练不稳定的问题,并且结构易于设计和实现。但同时,其依赖于高斯噪声假设来进行数学推理,可能会导致与真实场景的噪声不匹配。另外在inference过程中,由于需要经过多个采样步骤,和GAN相比其推理时间会更长。
- What are the differences between diffusion models and recurrent U-Net?
从inference pass而言,diffusion model输入$(x_t,t[\gamma, or else, …])$,然后将输出不断的当成输入继续送入网络。而对于recurrent U-Net来说,也是将得到的结果不断在U-Net中循环计算。但不同的是,diffusion model还需要知道当前的时刻$t$或是噪声率$\gamma$等相关的参数,然后在当前步骤中进行下一个时刻的求解;而不断的重复U-Net仅仅是对输入时刻的数据进行相同的求解。正如DDIM中阐述的,diffusion model的本质可以看成是一个SDE的求解的离散化过程,而在单一的不断重复的U-Net中实际上并不能改变其求解方向。
- Can diffusion models be used in denoising?
如DSR等工作已经将diffusion model用于denoise,但要想生成高质量的图片,需要经过更多步骤的采样,而对于我们实时性的要求在目前而言显然还是不能够满足。
Reference
[1] Deep Unsupervised Learning using Nonequilibrium Thermodynamics, ICLR 2015
[2] Denoising Diffusion Probabilistic Models, NeurIPS 2020
[3] Understanding Variational Autoencoders (VAEs)
[4] Denoising Diffusion Implicit Models, ICLR 2021
[5] Image Super-Resolution via Iterative Refinement, T-PAMI 2022
[6] Deblurring via Stochastic Refinement, CVPR 2022
[7] Generative Modeling by Estimating Gradients of the Data Distribution, NeurIPS 2019
[8] Score-Based Generative Modeling through Stochastic Differential Equations, ICLR 2021
[9] DiffuStereo: High Quality Human Reconstruction via Diffusion-based Stereo Using Sparse Cameras, ECCV 2022